Pulsbreite/Frequenz messen
von Gerd Sinning
Elektronik-Labor
Projekte
AVR
Hier
ist ein kleiner Arduino Sketch, mit dem man Pulsbreite oder Frequenz
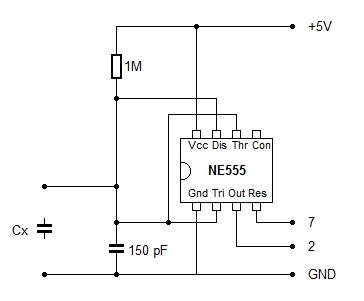
messen kann, umschaltbar. Zusammen mit einem CMOS 555 wird damit
die Kapazität von Kondensatoren gemessen. Der Reset vom 555 wird auf
high geschaltet und dann wird bis zur fallenden Flanke von Int0
gezählt. C=(Pulsbreite -Pulsbreite0) / R und mit R=1 MOhm lässt sich
das einfach berechnen. Die Pulsbreite in us und die Kapazität werden
seriell ausgegeben. Da noch Platz im flash war ist noch ein
Frequenzzähler hinzugekommen. Er hat eine feste gate time von 1 Sekunde
und zeigt die Frequenz in Hz, sogar recht genau, bei 1 MHz nur 7 Hz
zuviel. Es funktioniert bis ca. 5 MHz.
Download: PW_FreqCnt.zip
/*
Arduino measures Period & Frequency
connect pin4 to a switch, high measures PW and C, low measures Frequency
Pulsewidth, pin4 switch to high or open
with a cmos 555 used to measure capacitance
connect pin7 to 555 reset(4), Int0 pin2 to 555 out(3)
C = pulsewidth / R, R = 1 MOhm, astable mode w C0=150pF
measures pulse width in microseconds on Int0
Counter1 is counting during Int0 high
Frequency, pin4 switch to low
connect pin5 T1 in to signal
GS 2014
This is free software; you can redistribute it and/or
modify it under the terms of the GNU Lesser General Public
License as published by the Free Software Foundation; either
version 2.1 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public
License along with this library; if not, write to the Free Software
Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
*/
volatile unsigned long f_freq;
volatile unsigned int f_tics;
volatile unsigned char p_ready;
volatile unsigned char p_mlt;
volatile unsigned long p_pwidth;
unsigned long Frequency;
unsigned long Pulsewidth;
unsigned int PulsewidthZero;
float capacitance;
int cnt;
int pinLed=13;
int pinReset=7;
int pinZero=6;
int pinSwitch=4;
//******************************************************************
void Int0_ISR()
{
// wait for Int0 falling
TCCR1B = TCCR1B & ~7; // then Counter T1 is stopped
digitalWrite(pinReset, LOW); // stop 555 now
p_ready=1; // set flag for end count Pulsewidth
p_pwidth=0x10000 * p_mlt; // mult T1 #overflows by 65636
p_pwidth += TCNT1; // add counter1 value
p_mlt=0;
TIMSK0 |=(1<<TOIE0); // enable Timer0 again, millis and delay
}
ISR(TIMER2_COMPA_vect)
{
// 1ms gate time = 1000 ms fixed
if (f_tics >= 1000) // end of gate time, measurement ready
{
TCCR1B = TCCR1B & ~7; // Gate Off / Counter T1 stopped
TIMSK2 &= ~(1<<OCIE2A); // disable Timer2 Interrupt
TIMSK0 |=(1<<TOIE0); // enable Timer0 again // millis and delay
p_ready=1; // end of count period
// calculate frequeny value
f_freq=0x10000 * p_mlt; // mult #overflows by 65636
f_freq += TCNT1; // add counter1 value
p_mlt=0;
}
f_tics++; // count number of T2 interrupts
}
ISR(TIMER1_OVF_vect)
{
p_mlt++; // count number of Timer1 overflows
}
void setup()
{
pinMode(pinReset, OUTPUT);
digitalWrite(pinReset, LOW); // stop 555 now
pinMode(pinLed, OUTPUT); // on board led
pinMode(pinZero, INPUT); // store zero value
pinMode(pinZero, INPUT_PULLUP);
pinMode(pinSwitch, INPUT); // switch PW or frequency
pinMode(pinSwitch, INPUT_PULLUP);
Serial.begin(9600); // prepare for serial out
Serial.println("Pulse / Frequency Counter");
attachInterrupt(0,Int0_ISR,FALLING); // Catch high too low transition
// TIMER1_OVF_vect
}
void pwget_ready()
{
TIMSK0 &=~(1<<TOIE0); // disable Timer0 millis and delay
// set timer/counter1 normal mode, counting
TCCR1A=0; //timer/counter1 control register A
TCCR1B=0; // timer/counter1 control register A
TIMSK1 |= (1<<TOIE1) ; // overflow ISR(TIMER1_OVF_vect)
p_ready=0; // reset period ready flag
p_mlt=0; // counts number of Timer1 overflows
GTCCR = (1<<PSRASY); // reset prescaler Timer1
TCNT1=0; // Counter1 = 0
}
void freqget_ready()
{
TIMSK0 &=~(1<<TOIE0); // disable Timer0 millis and delay
// set timer/counter1 normal mode, counting
TCCR1A=0; //timer/counter1 control register A
TCCR1B=0; // timer/counter1 control register A
TIMSK1 |= (1<<TOIE1) ; // overflow ISR(TIMER1_OVF_vect)
//TCCR1B |= (1<<CS12)|(1<<CS11) | (1<<CS10) ;
// External clock source on T1 pin. Clock on rising edge.
// timer2 setup / is used for frequency measurement gatetime generation
TCCR2A=0;
TCCR2B=0;
//set timer2 to CTC Mode with OCR2A is top counter value
TCCR2A &= ~(1<<WGM20) ;
TCCR2A |= (1<<WGM21) ;
TCCR2A &= ~(1<<WGM22) ;
OCR2A = 124; // CTC divider by 125
// timer 2 presaler set to 128 / timer 2 clock = 16Mhz / 256 = 62500 Hz
TCCR2B |= (1<<CS20) ;
TCCR2B &= ~(1<<CS21) ;
TCCR2B |= (1<<CS22) ;
p_ready=0; // reset ready flag
p_mlt=0; // counts number of Timer1 overflows
f_tics=0;
GTCCR = (1<<PSRASY); // reset prescaler Timer1
TCNT2=0; // timer2=0
TIMSK2 |=(1<<OCIE2A); // enable Timer2 Interrupt
TCNT1=0; // Counter1 = 0, start counting now
TCCR1B |= (1<<CS12) | (1<<CS11) | (1<<CS10);
}
void loop() {
if (digitalRead(pinSwitch) == HIGH) // HIGH = PW, LOW=Frequency
{
EIMSK |=(1<<INT0); // enable Int0 Interrupt
pwget_ready();
digitalWrite(pinReset, HIGH); // start 555
TCCR1B |= (1<<CS10); // start T1 counting now
while (p_ready == 0) // wait for Int0 falling
Pulsewidth=(15*Pulsewidth + p_pwidth)/16; // running average
if (digitalRead(pinZero) == LOW) // read the zero pin
{
PulsewidthZero=Pulsewidth; // store zero Pulsewidth
}
capacitance=(Pulsewidth-PulsewidthZero)/16.0; //in pF C=pw/R R=1 MOhm
Pulsewidth=Pulsewidth/16; // in microseconds
Serial.print(" PW= ");
Serial.print(Pulsewidth);
Serial.print(" C= ");
if (capacitance < 1000) {
Serial.print(capacitance);
Serial.println(" pF");
} else {
Serial.print(capacitance/1000.0);
Serial.println(" nF");
}
} else
{
EIMSK &=~(1<<INT0); // disable Int0 Interrupt
freqget_ready();
while (p_ready == 0) // wait for gate time
Frequency=f_freq;
Serial.print(" F= ");
Serial.print(Frequency);
Serial.println(" Hz");
}
delay(50);
digitalWrite(pinLed,!digitalRead(pinLed)); // blink Led 13 on board
}
Elektronik-Labor
Projekte
AVR