Serielle Schnittstelle für den HT66F30
Der
Holtek HT66F30 hat von sich aus keine serielle Schnittstelle. Aber für
das Debuggen kann man auf jeden Fall eine gebrauchen. Das Beispiel von
Hermann Nieder für den HT46F47 war in Assembler geschrieben. Unter den
C-Beispielen des Compilers fand sich aber auch das Projekt Serial. Es
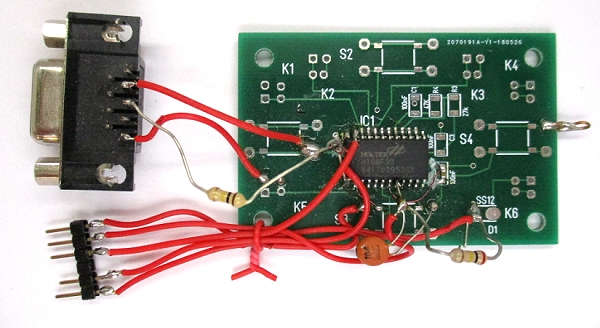
ließ sich leicht für den HT66F30 anpassen. Außerdem habe ich für die
Funktionen tansmit und receive jeweils eine invertierte Version
erzeugt, die ohne zusätzliche Hardware direkt an einer RS232
angeschlossen werden kann. In dem Fall ist nur ein Widerstand von 100 k
in der RX-Leitung nötig.
void transmit(unsigned char);
void transmit_inv(unsigned char);
void receive(unsigned char *);
void receive_inv(unsigned char *);
#include "HT66F30.h"
//Serial.c
//
//Mask option
//WDT : Disable
//the others use the default value
#pragma vector isr_4 @ 0x4
#pragma vector isr_8 @ 0x8
#pragma vector isr_c @ 0xc
//ISR for safequard
void isr_4(){} // external ISR
void isr_8(){} // timer/event 0
void isr_c(){} // timer/event 1
#define tx _pa1 //transmit pin
#define rx _pa0 //receive pin
unsigned char data;
unsigned char vall[10] @0x20;
void transmit(unsigned char);
void transmit_inv(unsigned char);
void receive(unsigned char *);
void receive_inv(unsigned char *);
//system frequency: 4MHz
//#define T 104 //baudrate 19200 = 8M/4/(T) => T = 104
#define T 208 //baudrate 9600 = 8M/4/(T) => T = 208
//#define T 416 //baudrate 4800 = 8M/4/(T) => T = 416
//#define T 832 //baudrate 2400 = 8M/4/(T) => T = 832
void transmit(unsigned char val){
unsigned char i;
tx = 0;
_delay(T-14);
for(i=0; i<8; i++)
{
if (val & 1)
tx = 1;
else
tx = 0;
val >>= 1;
_delay(T-14);
}
tx = 1;
_delay(T);
}
void transmit_inv(unsigned char val){
unsigned char i;
tx = 1;
_delay(T-14);
for(i=0; i<8; i++)
{
if (val & 1)
tx = 0;
else
tx = 1;
val >>= 1;
_delay(T-14);
}
tx = 0;
_delay(T);
}
void receive(unsigned char *val)
{
unsigned char i,v;
v = 0;
while(rx); //wait start bit
_delay(T);
_delay(T/2); //
for(i=0; i<8; i++) {
v >>= 1;
if (rx)
v |= (unsigned char)0x80;
_delay(T-14); //
}
*val=v;
}
void receive_inv(unsigned char *val)
{
unsigned char i,v;
v = 0;
while(!rx); //wait start bit
_delay(T);
_delay(T/2); //
for(i=0; i<8; i++) {
v >>= 1;
if (!rx)
v |= (unsigned char)0x80;
_delay(T-14); //
}
*val=v;
}
//a long time delay
void mydelay(unsigned int times){
while(times--) _delay(65000);
}
void main(){
unsigned char i, j, idx;
_pbc = 0;
_pb = 85;
_acerl = 0; //Port a kein AD-Input sondern Port
_cp0c =0; // Conparator frei geben
_cp1c =0; // Conparator frei geben
_pac = 0; //set port A to output port
_pa = 0; //zero port A
_pac0 = 1; //set receive pin to input mode
_pac1 = 0; //set transmit pin to output mode
tx = 0;
while(1)
{
receive_inv(&data);
//data = 85;
transmit_inv(data);
// _delay(50000);
}
// _papu = 255; //pullup
while(1) {
_pb = 85;
_pa = 85;
_delay(1000);
_pb = 170;
_pa = 170;
_delay(1000);
}
}
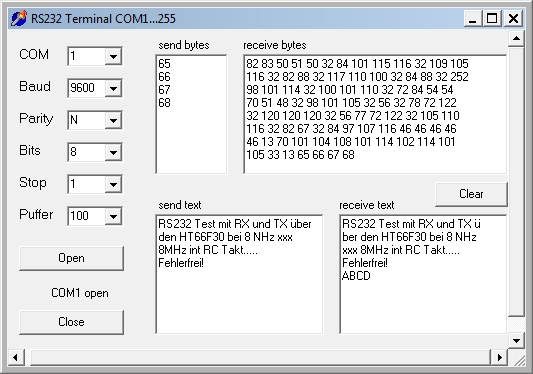
Ein
Test mit Terminal.exe zeigt eine korrekte Übertragung der empfangenen
Zeichen. Obwohl für den internen RC-Oszillator 5 V vorgesehen
ist, läuft die Übertragung auch bei 3 V noch fehlerfrei.