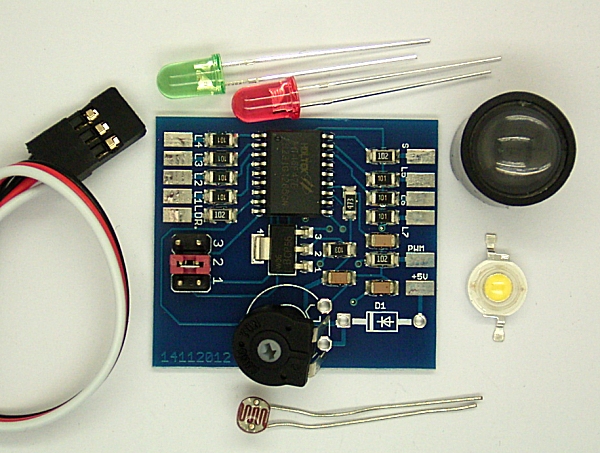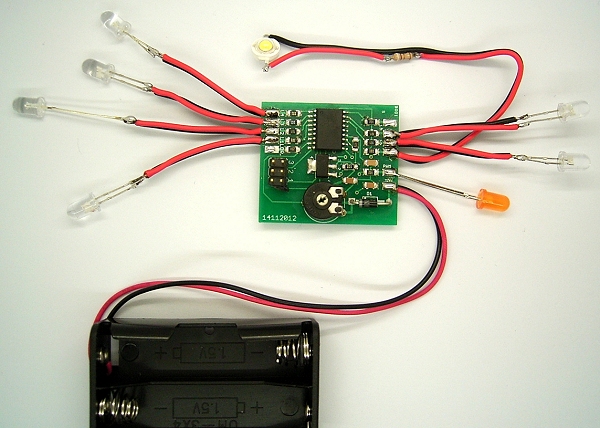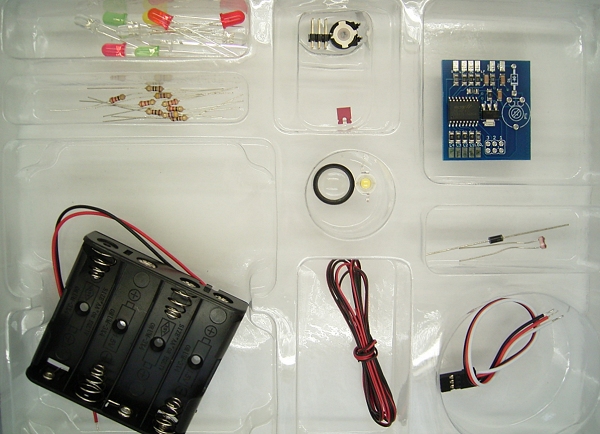
Die
zentrale Steuerplatine mit bis zu acht LED-Anschlüssen wird über zweiadrige
Kabel mit den passenden LEDs verdrahtet. Ein Mikrocontroller sorgt für den
automatischen Ablauf. Wählen Sie das passende Steuerprogramm aus und stellen
Sie die gewünschten Geschwindigkeiten oder Zeiten ein. Zusätzliche Widerstände
dienen zur individuellen Anpassung der LED-Helligkeit. Auch die Steuerung über
einen Lichtsensor ist möglich.