Motorsteuerung mit dem IC 4093
Ziel
dieses Projektes ist die Ansteuerung eines kleinen Motors, wie er z. B.
im Modellbau verwendet wird, mittels Tasten. Dabei soll der Motor ein-
und ausgeschaltet sowie die Drehrichtung geändert werden. Hierfür sind
zwei RS-Flip-Flops erforderlich, die mit dem 4093 realisiert werden
können.
Es
ist jeweils ein Flip-Flop für Ein- /Ausschalten und für Rechts-
/Linkslauf vorgesehen. Für die Umschaltung rechts/links wird der Motor
idealerweise direkt an den beiden Ausgängen des Flip-Flop
angeschlossen. Da der Ausgangsstrom eines einzelnen Gatters zu klein
für den Betrieb des Motors ist, wurden jeweils drei Gatter parallel
geschaltet. Laut Datenblatt (von National Semiconductor) liefert der
4093 bei einer Betriebsspannung von 15 V typisch 8,8 mA pro Gatter, d.
h. es stehen ca. 26 mA zur Verfügung. Der im Musteraufbau verwendete
Motor ist ein 12-V-Typ und zieht im Leerlauf 18 mA. Bei Belastung
steigt der Strom natürlich an, die 26 mA haben sich aber als
ausreichend erwiesen.
Die Umschaltung zwischen Rechtslauf und
Linkslauf erfolgt mit den Tasten S4 (L) und S5 (R). Durch den
Kondensator C6 parallel zu S5 wird das Flip-Flop im Einschaltmoment
standardmäßig auf Rechtslauf gesetzt.
Die beiden verbleibenden
Gatter bilden ein weiteres RS-Flip-Flop, welches für das Ein- und
Ausschalten der Betriebsspannung zuständig ist. Die Betriebsspannung
wird mit dem Transistor VT1 geschaltet, der wiederum von VT2 gesteuert
wird.
Zum Einschalten des Gerätes wird mit der Taste S1 der
Transistor VT1 überbrückt, so dass die beiden Schaltkreise ihre
Betriebsspannung erhalten. Das Flip-Flop aus D1C und D1D wird durch den
Kondensator C5 im Einschaltmoment gesetzt (Pin 10 auf H-Pegel). Dadurch
wird VT2 und folglich auch VT1 durchgesteuert, und das Gerät bleibt
eingeschaltet, wenn die Taste wieder geöffnet wird..
Alternativ
kann auch mit der Taste S3 eingeschaltet werden. Durch Schließen von S3
wird VT1 geöffnet, alles weitere erfolgt wie beschrieben. Diese
Variante hat den Vorteil, dass jetzt alle Tasten gegen Masse schalten.
So können die Tasten durch Transistoren ersetzt werden, die z. B. von
einem Mikrocontroller angesteuert werden.
Durch kurzes Schließen
der Taste S2 wird das Flip-Flop zurückgesetzt, VT2 und VT1 gesperrt und
die Betriebsspannung damit ausgeschaltet.
Um Motoren mit höherer
Leistung zu betreiben, muss die Ansteuerung durch eine Endstufe ergänzt
werden, realisiert durch eine Brückenschaltung aus vier Transistoren
(zwei Komplementärpaare). Die parallel geschalteten Gatter im Flip-Flop
können dann entfallen, so dass ein Schaltkreis 4093 ausreicht.
Bei
dieser Schaltung wurde auch die Tastensteuerung vereinfacht. Die
Einschalttaste entfällt, das Einschalten erfolgt mit einer der beiden
Richtungstasten. Damit kann beim Einschalten gleich die gewünschte
Drehrichtung gewählt werden, eine Vorzugsrichtung gibt es nicht.
Beim
Betätigen einer der Tasten S2 oder S3 wird der Transistor VT1 (über VD1
oder VD2) durchgesteuert und das Gerät eingeschaltet. Zusätzlich wird
das Richtungs-Flip-Flop in die gewünschte Stellung gebracht. Die Dioden
VD1...4 dienen zur Entkopplung.
Auch diese Variante der
Motorsteuerung habe ich zunächst auf einem Labor-Steckbrett aufgebaut,
um die Schaltung zu Testen und zu optimieren.
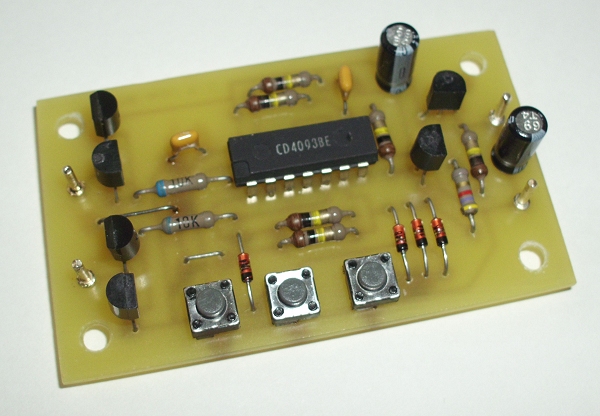
Schließlich habe ich auch eine Leiterplatte (einlagig) entworfen. Die Abmessungen betragen 40 mm x 68 mm.
(Beachte: Layoutzeichnung und Bestückungszeichnung sind mit Blick auf Bestückungsseite dargestellt.)
Das
Layout ist so gestaltet, dass die Schaltung auch auf einer
Lochrasterplatte mit 2,54-mm-Raster aufgebaut werden kann, d. h.
sämtliche Pads und Leitungen des Layouts liegen im entsprechenden
Raster.
Das Foto zeigt den Musteraufbau auf einer geätzten Leiterplatte.
Das Leiterplattenlayout kann PDF-Datei im Maßstab 1:1 heruntergeladen und als Belichtungsvorlage verwendet werden.
Download:
1401_Motorsteuerung_Layout.pdfNachtrag:
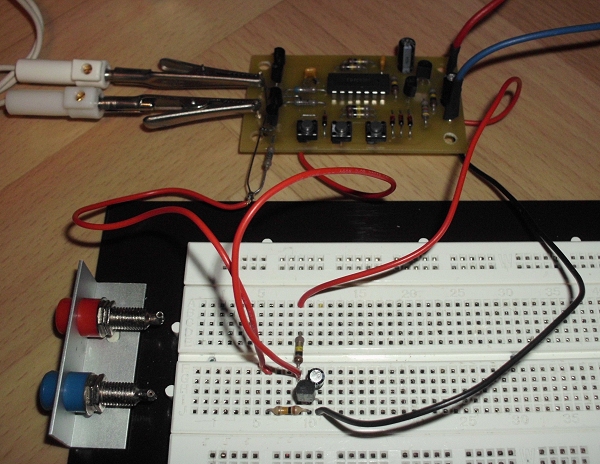
Nachdem
die Leiterplatte bereits fertig aufgebaut war, hatte ich noch eine Idee
für eine Ergänzung der vorgestellten Schaltung: Ein Überlastschutz,
durch den das Gerät abgeschaltet wird, wenn der Motorstrom zu groß wird.
Hierzu
wird die Masseverbindung der beiden Endstufen aufgetrennt. Die
Kollektoren von VT5 und VT6 werden über einen gemeinsamen Widerstand
R10 mit Masse verbunden. Der Spannungsabfall an diesem Widerstand ist
proportional zum Motorstrom und wird zur Überwachung herangezogen.
Sobald die Spannung etwa 0,7 V erreicht, wird der Transistor VT7
durchgesteuert, das Betriebsspannungs-Flip-Flop zurückgesetzt und damit
das Gerät ausgeschaltet.
Das RC-Glied R11/C5 dient zur
Verzögerung des Ausschaltvorganges. Diese ist erforderlich, weil sowohl
beim Einschalten des Motors als auch beim Umschalten der Drehrichtung
kurzzeitig ein höherer Strom fließt, wodurch die Betriebsspannung
sofort wieder abgeschaltet werden würde.
Der Widerstand R10 ist entsprechend dem gewünschten Abschaltstrom zu dimensionieren.
Das Bild zeigt den Laboraufbau für diese Ergänzung.