 Lernpaket Mikrocontroller Kap 7
Lernpaket Mikrocontroller Kap 7
7 Interfaces und Datenlogger
Die Verwendung der
Interface-Software wurde bereits in Kap. 2 vorgestellt. Hier soll das dahinter
liegende Programm genauer erläutert werden. Es ergeben sich dabei neue
Möglichkeiten und Varianten für spezielle Aufgaben. Der ATtiny85 besitzt 512
Byte RAM und 512 Byte EEPROM. Damit lassen sich erweiterte Interfaces und
Datenlogger realisieren.
7.1 Das universelle Interface
Das Interface-Programm des
Lernpakets wurde bereits in Kap. 2 ausführlich vorgestellt und erprobt. Es
basiert auf Byte-Kommandos, über die Ausgänge gesteuert oder Eingänge abgefragt
werden. Das Interface-Protokoll ist angelehnt an das SIOS-Interface von
AK-Modul-Bus und verwendet Gruppen von Byte-Kommandos, die sich leicht
erweitern lassen.
&H10: digitale Ausgänge
setzen
&H20: digitale Eingänge
lesen
&H30: analoge Eingänge
lesen
&H40: analoge Ausgänge
setzen
Das Interface-Programm
besteht im Kern aus einer Interpreterschleife, in der Kommandos vom PC
ausgewertet und ausgeführt werden. Am Anfang der Schleife wird ein Byte
empfangen und als Kommando in die Variable Kom kopiert. Gültige Kommandos sind
z.B. die Bytes 1, 16, 17, 18 und 32. Entsprechende Programmabschnitte führen
jeweils einen Vergleich mit einer Konstanten aus. Wenn ein Kommando erkannt
wurde, folgt eine zugehörige Ausgabe oder Eingabe. Im anderen Fall verzweigt
das Programm zum nächsten Vergleich. Die gesamte Kommunikation läuft mit 9600
Baud. Ein typisches Kommando mit zwei Bytes wird daher in etwa zwei
Millisekunden ausgeführt. Eine Interface-Abfrage mit dem Kommando 1 liefert die
Antwort 100 und dient nur zur Überprüfung der Bereitschaft.
Das SIOS-kompatible Kommando
16 (&H10) dient zur Ausgabe eines folgenden Bytes an den Port B. Mit dem
Kommando 17 wird die Datenrichtung festgelegt. In beiden Fällen werden Die
Leitungen RXD und TXD ausmaskiert, um die serielle Kommunikation nicht zu
stören. Das Kommando 18 initialisiert den PWM-Ausgang PWM0A.
Das Kommando 32 (&H20) fragt
den Zustand des Ports B ab. Mit der Abfrage 48 und 49 erhält man 8-Bit-Werte
des AD-Wandlers für die Kanäle 2 und 3. Mit 56 und 57 werden dieselben Kanäle
mit einer Auflösung von 10 Bit gemessen, wobei die Antwort dann jeweils aus
zwei Bytes besteht. Das Kommando 64 schließlich dient zur Ausgabe eines
8-Bit-PWM-Wertes an PWM0A.
'ATtiny85
Interface
$regfile
= "attiny85.dat"
$crystal
= 8000000
$hwstack
= 8
$swstack
=
4
'
16
$framesize
= 4
Dim
Kom As Byte
Dim
Dat As Byte
Dim
U As Word
Dim
Hi As Byte
Dim
Lo As Byte
Dim
N As Byte
Dim
Nn As Word
Dim
D(400) As Byte
Open
"comb.2:9600,8,n,1" For Input As #1
Open
"comb.1:9600,8,n,1" For Output As #2
Config
Adc = Single , Prescaler = 16
Start
Adc
Clkpr
= 128 '8 MHz
Clkpr
= 0
Clkpr
= 0
Ddrb
= &B00000011
Do
Get #1 , Kom
If Kom = 1 Then
Put #2 , 100
End If
If Kom = 16 Then
Get #1 , Dat
Dat = Dat And &B00011011
Dat = Dat Or &B00000010
Portb = Dat
End If
If Kom = 17 Then
Get #1 , Dat
Dat = Dat And
&B00011011
Dat = Dat Or &B00000010
Ddrb = Dat
End If
If Kom = 18 Then
Config Timer0 = Pwm , Prescale = 64 , Compare A
Pwm = Clear Up
Pwm0a = 0
End If
If Kom = 32 Then
Dat = Pinb
Put #2 , Dat
End If
If Kom = 48 Then
U = Getadc(2)
Shift U , Right , 2
Put #2 , U
End If
If Kom = 49 Then
U = Getadc(3)
Shift U , Right , 2
Put #2 , U
End If
If Kom = 56 Then
U = Getadc(2)
Hi = High(u)
Lo = Low(u)
Put #2 , Hi
Put #2 , Lo
End If
If Kom = 57 Then
U = Getadc(3)
Hi = High(u)
Lo = Low(u)
Put #2 , Hi
Put #2 , Lo
End If
If Kom = 64 Then
Get #1 , Dat
Pwm0a = Dat
End If
…
…
Loop
Listing 7.1:
I/O-Funktionen des Interface-Programms
7.2 Das Oszilloskop
Das Interface enthält eine
Oszilloskop-Funktion. Im Einkanal-Betrieb (Kommando 100) werden 361 Messwerte
im Byte-Format gespeichert. Sofort nach der eigentlichen Messung schickt das
Programm die Daten an den PC.
Config
Adc = Single , Prescaler = 16
…
If
Kom = 100 Then
For Nn = 1 To 362
U = Getadc(2)
Shift U , Right , 2
D(nn) = U
Next Nn
For Nn = 1 To 361
Dat = D(nn)
Put #2 , Dat
Next Nn
End If
If Kom = 101 Then
For N = 0 To 180
U = Getadc(2)
Shift U , Right , 2
Nn = N * 2
Nn = Nn + 1
D(nn) = U
U = Getadc(3)
Shift U , Right , 2
Nn = Nn + 1
D(nn ) = U
Next
N
For Nn = 1 To 362
Dat = D(nn)
Put #2 , Dat
Next Nn
End If
Listing 7.2: Die
Oszilloskop-Funktion
Die Zweikanal-Variante wird
mit dem Kommando 101 gestartet und liefert 181 ineinander geschachtelte Werte
für jeden Kanal. Die Geschwindigkeit hängt von der Einstellung des AD-Wandlers
ab. Für maximale Auflösung sollte der AD-Wandler mit einem Takt zwischen 50 kHz
und 200 kHz betrieben werden. Mit der Einstellung Prescaler = 16 hat man
bereits einen Takt von 500 kHz. Das ist jedoch problemlos, weil die Auflösung
auf 8 Bit reduziert wird. Jede Einzelmessung benötigt damit etwa 70 µs, sodass
man eine Abtastrate von ca. 14 kHz bekommt. Damit braucht die Serie mit 361
Einzelmessungen etwa 25 ms.
Der Timer 0 wird mit
Prescaler = 64 betreiben und liefert damit eine PWM-Frequenz von 244 Hz. Die
Frequenz wurde relativ niedrig gewählt, damit Experimente mit dem eigenen
Oszilloskop im Interface möglich sind. Wenn es aber auf eine einfache Glättung
der PWM-Ausgangsspannung ankommt, ist eine höhere Frequenz besser.
Die schnellere Variante des
Interface-Programms ist Interface2.bas. Der Timer0 wird mit Prescaler = 1,
betrieben, sodass die PWM-Frequenz auf 16 kHz steigt. Der AD-Wandler läuft nun
mit Prescaler = 4, was die Abtastrate auf 36 kHz erhöht. Das Oszilloskop stellt
nun einen Bereich von 10 ms dar. Bild 7.1 zeigt, dass trotz der hohen
Abtastrate noch eine gute Auflösung erreicht wird.
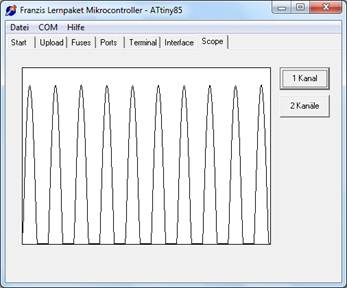 Abb. 7.1: Ein Signal mit 1
kHz
Abb. 7.1: Ein Signal mit 1
kHz 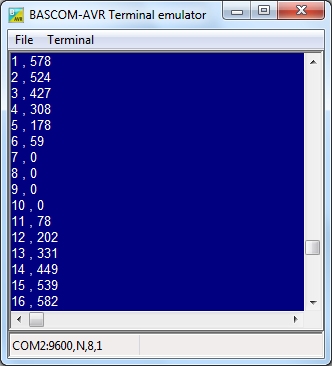 Abb. 7.2 Messdaten im RAM
Abb. 7.2 Messdaten im RAM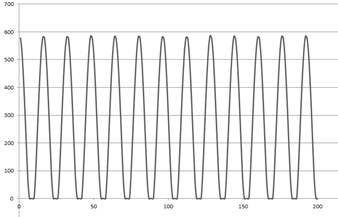 Abb. 7.3: Eine
300-Hz-Schwingung
Abb. 7.3: Eine
300-Hz-Schwingung 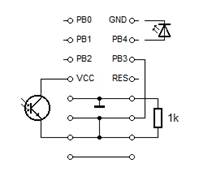 Abb. 7.4: Datenlogger mit
roter LED als „Startschlüssel“
Abb. 7.4: Datenlogger mit
roter LED als „Startschlüssel“ 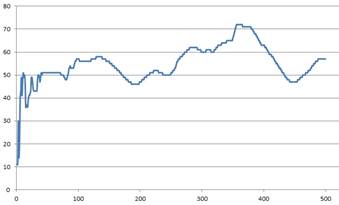 Abb. 7.5: Langzeitmessung der
Helligkeit
Abb. 7.5: Langzeitmessung der
Helligkeit
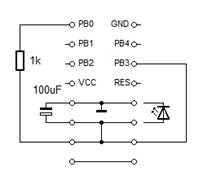 Abb. 7.6: Aufnehmen einer
LED-Kennlinie
Abb. 7.6: Aufnehmen einer
LED-Kennlinie 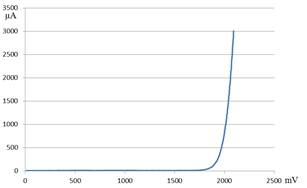 Abb. 7.7: Kennlinie einer
grünen LED
Abb. 7.7: Kennlinie einer
grünen LED 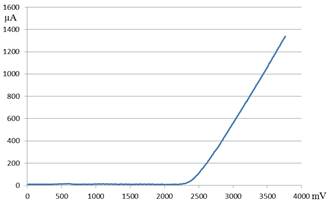 Abb. 7.8: Kennlinie LED mit
Vorwiderstand
Abb. 7.8: Kennlinie LED mit
Vorwiderstand