
Der HT46F47 tut schon in der
Modellbahnanlage seinen Dienst, warum dann nicht auch im Modellflieger? Die
Platine zur universellen Modellbahn-Beleuchtung kann ohne großen Umbau in einem
Flieger mitreisen und z.B. direkt an 4,8 V aus den NC-Akkus betrieben werden.
Alle möglichen Lichteffekte sehen sicherlich auch in der Luft gut aus.
Eine besondere Klasse von Aufgaben hat mit den Servo-Signalen zu tun. Wenn es
gelingt, die Servo-Signale auszuwerten, stehen viele Türen offen. Die Steuerung
muss dann nicht mehr völlig autonom arbeiten sondern kann auf
Fernsteuerkommandos reagieren.
Ein Blick ins Datenblatt zeigt eine erfreuliche Eigenschaft des Timers: Er kann
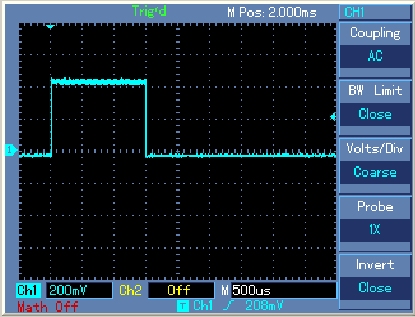
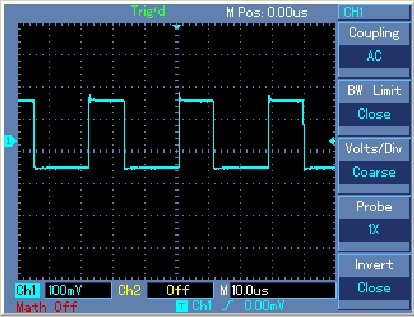
Impulslängen messen. Servosignale sind ja einfach nur Impulsfolgen mit
Impulslängen zwischen 1 ms und 2 ms. Sie müssen hier am Pin PA4/TMR
angeschlossen werden. Der Timer wird in der Betriebsart 3 (Impulslängenmessung)
gestartet. Man setzt das TON-Bit auf 1 und wartet auf einen Impuls. Mit dem
Impulsende wird TON automatisch auf Null gesetzt, woran man das Ende der
Messung erkennt. Nun kann das Ergebnis aus dem Timer-Register ausgelesen
werden. Eine neue Messung startet nicht ungefragt, sondern erst, wenn man das
TON-Bit wieder hochsetzt. Wichtig ist auch das TE-Bit, das die Polarität der
gesuchten Impulse angibt und hier auf 1 gesetzt werden muss. Und dann ist da
auch noch der Vorteiler, der passend eingestellt werden muss, damit das Messergebnis
bis 2 ms in den 8-Bit-Timer passt. Mit dem Vorteiler 64 ergibt sich bei ca. 4,5
MHz Taktfrequenz: die folgende maximal messbare Impulslänge 1 / 4500 kHz
* 64 * 255 = 3,6 ms.
#include "HT46F47E.h"
//RC-Osz mit 47 k, ca. 4,5 MHz, Servo-Eingag = PA4/TMR
#pragma vector isr_4 @ 0x4
#pragma vector isr_8 @ 0x8
#pragma vector isr_c @ 0xc
//ISR for safequard
void isr_4(){} // external ISR
void isr_c(){} // timer/event 0
void isr_8(){} // timer
void main(){
unsigned char i;
_intc = 5; //enable timer _intc = 0;
_tmr = 0;
_tmrc = 0xCE; //timer mode 3: Pulslaenge, TE=1, Vorteiler 64
_pbc = 0xff;
_pac = 0x10; //set port A to output port, PA4 I Impuls-Eingang
_pa = 0; //zero port A (all light on)
_pdc0 = 0; //PC0 Ausgang
_pd0 = 1; //PWM einschalten
_pwm = 100; //PWM-Ausgabe 0...255
_eadi = 0; //Kein Interupt
_acsr = 1; //AD-Clock = 1/8
_adcr = 8; //nur B0 als ADC0, AdC0 gewaehlt
while (1){
_tmr = 0; //Timerregister loeschen
_ton = 1; //Timer starten
while (_ton ==1); //Messung abwarten
_pwm = _tmr; //Ausgabe
}
}
while (1){
_tmr = 0; //Timerregister loeschen
_ton = 1; //Timer starten
while (_ton == 1); //Messung abwarten
i=_tmr;
if (i > 40) { //gueltiger Bereich ca. 75...150, 1 ms...2 ms
if (i > 80)
i = i - 80;
else
i=0;
if (i > 63) i=63;
i= i << 2;
_pwm = i;
_pa = i;
}
}
while (1){
_tmr = 0; //Timerregister loeschen
_ton = 1; //Timer starten
while (_ton == 1); //Messung abwarten
i=_tmr;
if (i > 40) { //gueltiger Bereich ca. 75...150, 1 ms...2 ms
if (i > 80)
i = i - 80;
else
i=0;
if (i > 63) i=63;
if (i < 15) _pa = 0;
if ((i>20) & (i<28)) _pa = 0x20;
if ((i>36) & (i<50)) _pa = 0x40;
if (i>52) _pa = 0x80;
i= i << 2;
_pwm = i;
}
}
'ATmega32, Servo
$regfile = "m32def.dat"
$crystal = 11059200
$hwstack = 16
$swstack = 32
$framesize = 32
Baud = 9600
Dim D As Integer
Config Servos = 1 , Servo1 = Portd.5 , Reload = 6
Config Portd = Output
Enable Interrupts
Do
D = Getadc(0)
D = D / 10
D = D + 100
Servo(1) = D
Waitms 200
Loop
Do
Servo(1) = 100 'links
Waitms 1000
Servo(1) = 200 'rechts
Waitms 1000
Loop
End