| Adresse | Befehl | Daten | Kommentar |
|
00 |
1 |
0 |
Dout 0 |
|
01 |
2 |
A |
Wait 2 s |
|
02 |
4 |
0 |
A=0 |
|
03 |
5 |
9 |
PWM=A |
|
04 |
2 |
3 |
Wait 10ms |
|
05 |
C |
E |
Skip if S1 =1 |
|
06 |
3 |
2 |
Jmp -2 |
|
07 |
2 |
3 |
Wait 10 ms |
|
08 |
C |
C |
Skip if S1 = 0 |
|
09 |
3 |
1 |
Jmp -1 |
|
0A |
7 |
1 |
A=A+1 |
|
0B |
3 |
8 |
Jmp -8 |
|
0C |
|
|
|
|
0D |
|
|
|
|
0E |
|
|
|
|
0F |
|
|
|
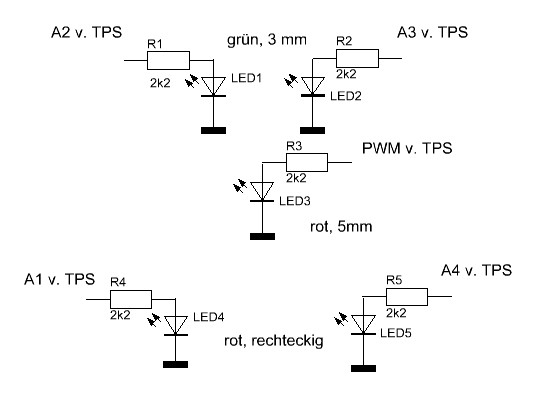
| Adresse | Befehl | Daten | Kommentar |
|
00 |
4 |
0 |
A=0 |
|
01 |
5 |
9 |
PWM=A, LED5 aus |
|
02 |
1 |
1 |
LED1 an |
|
03 |
2 |
8 |
Wait 500ms |
|
04 |
1 |
2 |
LED2 an |
|
05 |
2 |
8 |
Wait 500ms |
|
06 |
1 |
4 |
LED3 an |
|
07 |
2 |
8 |
Wait 500ms |
|
08 |
1 |
8 |
LED4 an |
|
09 |
2 |
8 |
Wait 500ms |
|
0A |
1 |
0 |
LEDs 1..4 aus |
|
0B |
4 |
F |
A=15 |
|
0C |
5 |
9 |
PWM=A, LED5 an |
|
0D |
2 |
8 |
Wait 500ms |
|
0E |
9 |
0 |
JMP 0 |
|
0F |
|
|
|
| Adresse | Befehl | Daten | Kommentar |
|
00 |
6 |
9 |
A=AD1 |
|
01 |
5 |
3 |
D=A |
|
02 |
1 |
1 |
Port=1 |
|
03 |
D |
B |
Call 0B |
|
04 |
1 |
4 |
Port=4 |
|
05 |
D |
B |
Call 0B |
|
06 |
1 |
2 |
Port=2 |
|
07 |
D |
B |
Call 0B |
|
08 |
1 |
8 |
Port=8 |
|
09 |
D |
B |
Call 0B |
|
0A |
3 |
A |
Jmp -10 |
|
0B |
6 |
3 |
A=D |
|
0C |
5 |
2 |
C=A |
|
0D |
2 |
5 |
Wait 50 ms |
|
0E |
A |
D |
C mal 0D |
|
0F |
E |
0 |
Return |
| Adresse | Befehl | Daten | Kommentar |
|
00 |
6 |
9 |
A=AD1 |
|
01 |
5 |
3 |
D=A |
|
02 |
1 |
1 |
Port=5 |
|
03 |
D |
B |
Call 0B |
|
04 |
1 |
4 |
Port=6 |
|
05 |
D |
B |
Call 0B |
|
06 |
1 |
2 |
Port=10 |
|
07 |
D |
B |
Call 0B |
|
08 |
1 |
8 |
Port=9 |
|
09 |
D |
B |
Call 0B |
|
0A |
3 |
A |
Jmp -10 |
|
0B |
|
|
|
|
0C |
|
|
|
|
0D |
|
|
|
|
0E |
|
|
|
|
0F |
|
|
|
| Adresse | Befehl | Daten | Kommentar |
|
00 |
4 |
0 |
A=0 ,
Einstellen der Timer-Zeit |
|
01 |
5 |
1 |
B=A
mit dem Trimmpoti, event. Korrektur,dann RESET-Taster |
|
02 |
6 |
9 |
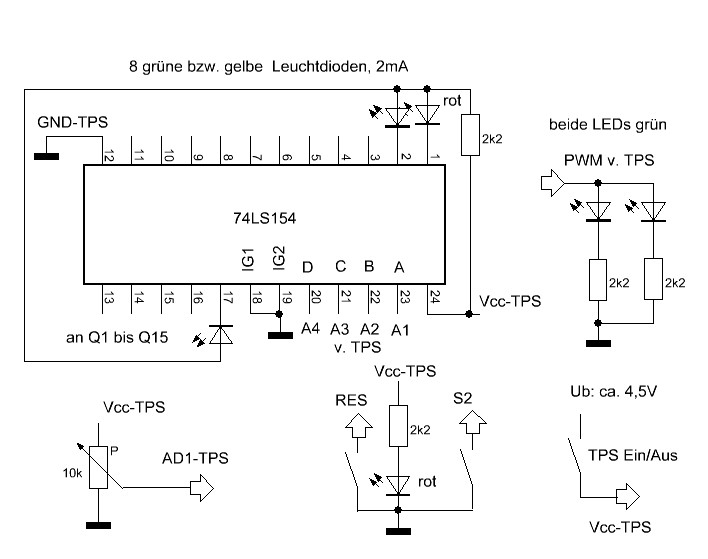
A=AD1, quasi-analoge Anzeige der Ablaufzeit |
|
03 |
5 |
4 |
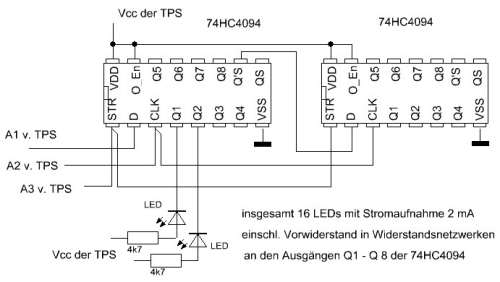
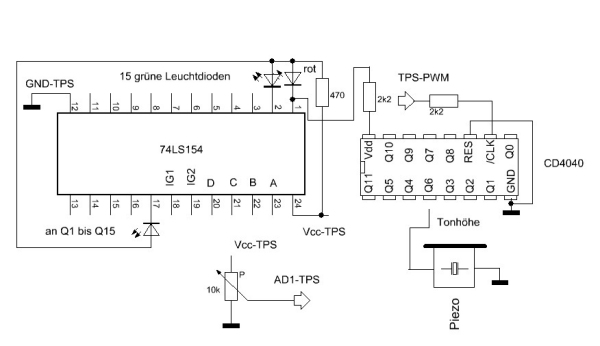
Port=A, mit 15 grünen LEDs an den Ausgängen
des 74LS154 |
|
04 |
8 |
6 |
Page 6
Timer starten mit S1 |
|
05 |
D |
0 |
Call 0 |
|
06 |
2 |
9 |
Wait 1 s
** |
|
07 |
7 |
2 |
A=A-1, Herunterzählen |
|
08 |
5 |
4 |
Port=A, und quasi-analoge |
|
09 |
2 |
9 |
Wait 1 s , Anzeige ** |
|
0A |
C |
3 |
Skip if A=B |
|
0B |
3 |
4 |
Jmp -4, bis auf 0 |
|
0C |
4 |
8 |
A=8
, dann PWM einschalten |
|
0D |
5 |
9 |
PWM=A, für Tonerzeugung |
|
0E |
1 |
1 |
Port=1
, mit CD4040 |
|
0F |
2 |
7 |
Wait 200ms, abwechselndes. Blinken der LED an
Q0 |
|
10 |
2 |
5 |
Wait 50ms
|
|
11 |
1 |
0 |
Port=0
; und der LED an Q1 |
|
12 |
2 |
7 |
Wait 200ms, sowie Piepen |
|
13 |
2 |
5 |
Wait 50ms
, des Piezo-Schallwandlers |
|
14 |
3 |
6 |
Jmp -6, bis Abschalten durch RESET-Taster |

| Adresse | Befehl | Daten | Kommentar |
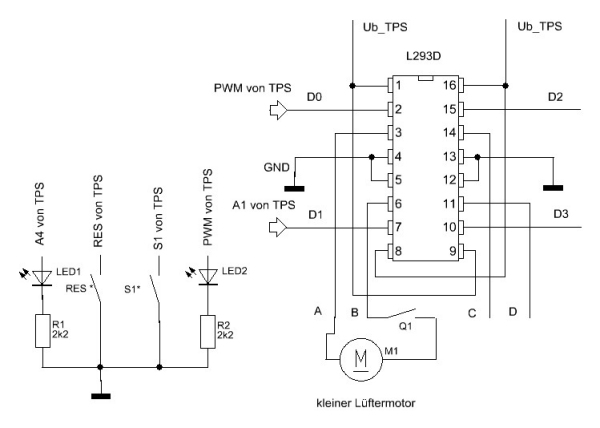
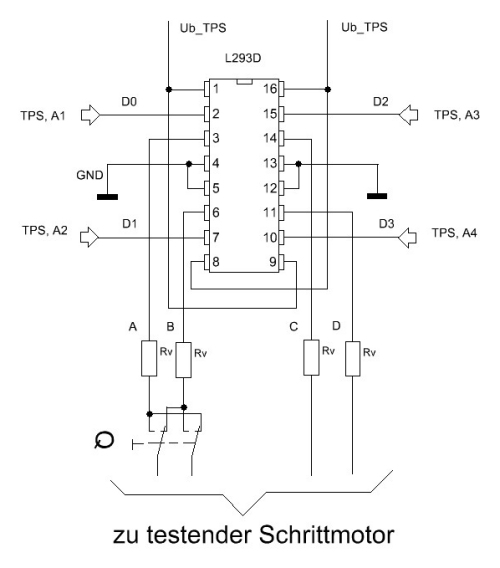
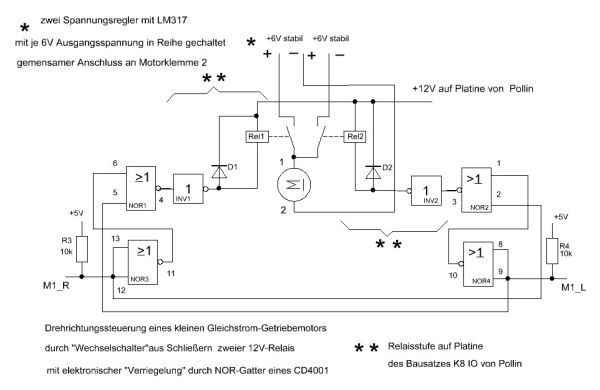
| 00 | 1 | 4 | Zunächst aufwärts fahren |
| 01 | C | 9 | wiederholen, bis Sensor oben erreicht wird |
| 02 | 3 | 2 | bei Erreichen Low-Pegel, keinen Sprung -2 mehr, |
| 03 | 1 | 0 | nun Motor aus |
| 04 | 2 | B | 5 s anhalten |
| 05 | 1 | 8 | abwärts fahren |
| 06 | C | 4 |
wiederholen, bis Sensor unten
erreicht wird |
| 07 | 3 | 2 | Bei Erreichen High-Pegel, keinen Sprung -2 mehr |
| 08 | 1 | 0 | Motor aus |
| 09 | 2 | B | 5 s anhalten |
| 0A | 9 | 0 | Sprung nach 0, also wieder aufwärtsfahren usw. |
| 0B | |||
| 0C | |||
| 0D | |||
| 0E | |||
| 0F |

| Adresse | Befehl | Daten | Kommentar |
|
00 |
4 |
F |
A=15 |
|
01 |
5 |
9 |
PWM=A, 5. Bit auf 1 |
|
02 |
1 |
A |
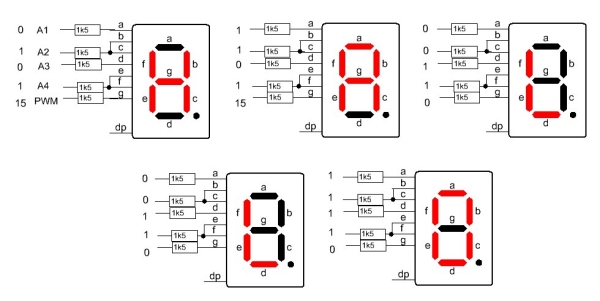
Port=10
→ H |
|
03 |
2 |
9 |
Wait 1 s |
|
04 |
1 |
B |
Port=11
→ A |
|
05 |
2 |
9 |
Wait 1 s |
|
06 |
4 |
0 |
A=0 |
|
07 |
5 |
9 |
PWM=A, 5. Bit auf 0 |
|
08 |
1 |
C |
Port=12
→ L |
|
09 |
2 |
9 |
Wait 1 s |
|
0A |
1 |
0 |
Port = 0,
kurze Unterbrechung |
|
0B |
2 |
6 |
Wait 100 ms, zwischen L u. L |
|
0C |
1 |
C |
Port=12
→ L |
|
0D |
2 |
9 |
Wait 1 s |
|
0E |
1 |
F |
Port=15
→ O |
|
0F |
2 |
B |
Wait 5 s |
|
10 |
9 |
0 |
Jmp 0 |