ATtiny13 und Bascom
Bascom übersetzt einen Basic-Quelltext in eine ausführbare Hex-Datei, die dann mit LPmsrT13.exe in den Controller geladen wird. Wer bereits in VB programmiert hat, findet sich mit Bascom schnell zurecht. Die auf der CD vorhandenen Quelltexte lassen sich leicht ändern und für eigene Aufgaben anpassen.
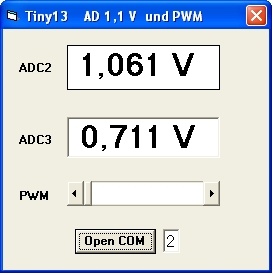
Der AD-Wandler des ATtiny13 besitzt eine interne Spannungsreferenz mit 1,1 V. Sie bietet die Möglichkeit, auch bei ungenauer USB-Betriebsspannung genau zu messen. Außerdem erreicht der AD-Wandler damit eine Auflösung von ca. 1 mV. Um diese Eigenschaft zu nutzen, ist eine kleine Modifikation an der Firmware nötig. Mit Bascom lässt sich besonders einfach der entscheidende Teil der Interface-Software nachprogrammieren. Hier sollen nur die 10-Bit-Messungen (Kommandos 56 und 57) und die PWM-Ausgabe (Kommando 64) verwendet werden.
'AD-Wandler 1,1 V
$regfile = "attiny13.dat"
$crystal = 1200000
Dim D As Byte
Dim Ad As Word
Dim K As Byte
Config Adc = Single , Prescaler = Auto ,
Reference = Internal
Start Adc
Config Timer0 = Pwm , Prescale = 1 ,
Compare A Pwm = Clear Down
Open "comb.1:9600,8,n,1,INVERTED" For Output As #1
Open "comb.2:9600,8,n,1,INVERTED" For Input As #2
Ddrb.0 = 1
Do
Get #2 , K
If K = 56 Then
Ad = Getadc(2)
D = High(ad)
Put #1 , D
D = Low(ad)
Put #1 , D
End If
If K = 57 Then
Ad = Getadc(3)
D = High(ad)
Put #1 , D
D = Low(ad)
Put #1 , D
End If
If K = 64 Then
Get #2 , D
Pwm0a = D
End If
Loop
End
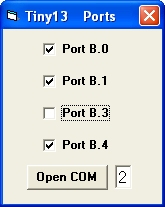
'Vier Ports
$regfile = "attiny13.dat"
$crystal = 1200000
Dim D As Byte
Dim K As Byte
Open "comb.2:9600,8,n,1,INVERTED" For Input As #2
Ddrb.0 = 1
Ddrb.1 = 1
Ddrb.3 = 1
Ddrb.4 = 1
Do
Get #2 , K
If K = 16 Then
Get #2 , D
D = D And &B00011011
Portb = D
End If
Loop
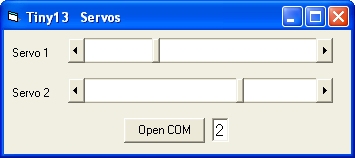
Bascom besitzt spezielle Befehle für die Servosteuerung. Sie verwenden jedoch einen Timer-Interrupt, der mit der Software-COM-Schnittstelle kollidiert. Deshalb werden die Impulse hier mit einfachen Zählschleifen erzeugt. Für jeden Impuls sendet der PC den Kanal (1 oder 2) und die Impulslänge (80 bis 160 für 1 ms bis 2 ms). Das PC-Programm legt daher auch die Wiederholrate fest.
'Servo-Controller
'Servo 1 an PB3
'Servo 2 an PB4
$regfile = "attiny13.dat"
$crystal = 1200000
Dim N As Byte
Dim D As Byte
Dim K As Byte
Open "comb.2:9600,8,n,1,INVERTED" For Input As #2
Declare Sub Servo1
Declare Sub Servo2
Ddrb.3 = 1
Ddrb.4 = 1
Do
Get #2 , K
Get #2 , D
If K = 1 Then Servo1
If K = 2 Then Servo2
Loop
Sub Servo1
Portb.3 = 1
For N = 1 To D
Next D
Portb.3 = 0
End Sub
Sub Servo2
Portb.4 = 1
For N = 1 To D
Next D
Portb.4 = 0
End Sub
End
zurück
zur Startseite